Virtuocity
- Overview: Virtuocity is a unique programme for city simulation and co-design. It provides an immersive, “human in the loop”, simulation and visualisation facility - “powered” by academic models and industry software, and delivered by an interdisciplinary team of academics with decades of expertise between them.
- Contact name: Pete Woodthorpe
- Phone: +44(0)113 343 8466
- Email: Virtuocity@leeds.ac.uk

Virtuocity is comprised of several simulation laboratories (University of Leeds Driving Simulator, Truck SIM, and the Highly Immersive Kinematic Experimental Research (HIKER) laboratory),
providing a world-leading technical platform and leverages research and innovation expertise from across the University of Leeds. Virtuocity also links to a wide range of external partners and stakeholders - making Leeds a world player in simulation and virtual prototyping of solutions to future challenges in urban mobility and urban dynamics.
Equipment

Driving Simulator
The University of Leeds Driving Simulator (UoLDS) continues to be one of the most technically advanced driving simulators in use within a research environment anywhere in the world today – and by far the most advanced in the UK.
Using funding from UK and European government grants and industry, the UoLDS is used to study the interaction of drivers with new technologies, typically before they are fully implemented on roads and in the vehicle. Realistic and repeatable scenarios allow studies on driver behaviour to be conducted in a safe and controllable environment, substantially reducing the costs associated with the development of real systems, infrastructures or prototypes.
Features of the UoLDS:
- A realistic and familiar driving environment to enhance the illusion of driving a real car
- Tactile and haptic feedback through the pedals and the steering wheel to replicate forces experienced during driving
- Immersed in a large Virtual Reality dome with a wrap-around projection of a driver’s eye view of the virtual world being driven
- Longitudinal and lateral movement via a “hexapod” motion base and X-Y table that together provide a realistic perception of motion
- Eye-tracking and other psychophysiological metrics can be used in the vehicle cab to continuously monitor the driver’s viewing direction and measure driver physiological status.
Our 2024/2025 Refurbishment included:
- Installation of an all new Nissan Qashqai vehicle cab including custom dashboard and infotainment screens
- New Native 4K projector array and Image Generation computers and all new projection enclosure
- Completely rebuilt custom simulator software architecture and visual rendering
This refurbishment allows Virtuocity to continue and further develop it's track record of world leading human-in-the-loop simulation projects with an up to date interface vehicle, improved performance and graphical appearance and a more robust system for the remainder of the simulator's lifespan.
HIKER
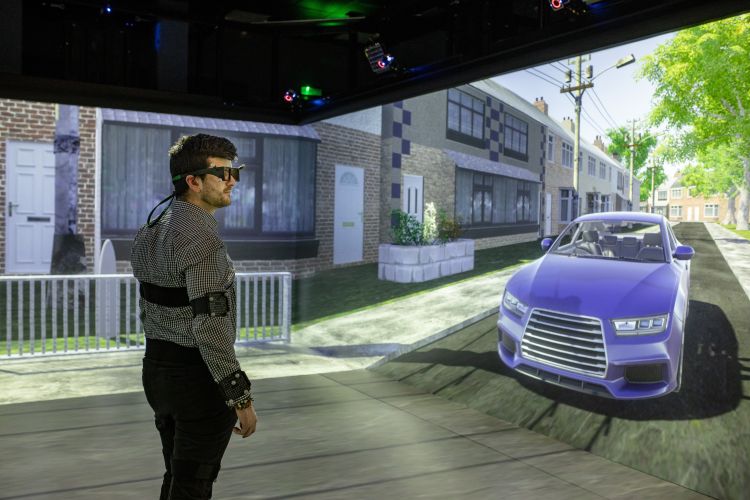
The Highly Immersive Kinematic Experimental Research (HIKER) lab is the largest, ‘CAVE-based’ pedestrian simulation environment of its type in the world. The HIKER lab allows participants to interact with a variety of urban environments and vehicles in a 9 x 4 m walking space with a level of real-world performance that is not possible using head-mounted Virtual Reality equipment.
The walls of the HIKER lab are plate glass with rear projection from an array of 4k projectors, with the whole scene responding to the participants head position and gaze. The result reproduces VR without the need for research participants wearing a VR headset, the use of which might undermine experiments that need to capture fine movements in real time. A notable example of this is the need for accurate split-second measurement of the interaction of people and vehicles in life-threatening situations. Safe pedestrian interaction with Autonomous Vehicles is a key current example of the research contribution of the HIKER lab.

Truck SIM
The Truck Simulator (Truck SIM; an advanced commercial vehicle simulator) is based on a full-size Volvo HGV cab and is built around a top-of-the-range commercial simulator system (AutoSim AS1300). It provides a flexible and realistic platform for undertaking advanced research investigations.
Features:
- Full scale real HGV cab with functioning instruments and brakes
- Sound and motion systems providing a realistic driving experience.
- Computer-monitored steering wheel and haptic driver feedback system.
- Rear-view mirrors with simulated LED displays showing the actual mirror scenery during simulated driving.
- Advanced 3D eye-tracking system capture hi-fidelity information about the driver’s focus and attention which can be matched to performance data from the Truck SIM driver interfaces.
Applications
Research on the driving simulator has shaped the understanding of how driver distraction affects road safety, providing guidelines for the implementation of speed advisory systems.
Other recent work has focused on the implementation of driver-friendly ecoDriving systems and human factors within highly automated vehicles.
The system has also been used to support the design and handling of new automobiles and to test Smart Motorways.
Who can use the facility?
The primary use of the facility is focused on the research, design and development of new transport systems as well as to understand the fundamental capabilities of humans. However the capabilities of our facilities and research and development team expand far beyond this into many different forms of virtual and extended reality usecases including medtech, visualisation and verification for internal spaces such as supermarkets many kinds of public spaces. City planners, automotive companies, infrastructure designers, government agencies and research organisations are encourage to contact us.
Our primary focus is on research especially through industry/government collaborations but we also regularly execute small consultancy projects.
Location
Virtuocity, 68 Hillary Place, Leeds.