Research project
interACT - Enabling the safe integration of automated vehicles into mixed traffic environments
- Start date: 1 May 2017
- End date: 30 April 2020
- Funder: EU Horizon 2020
- Primary investigator: Professor Natasha Merat

In the future, Automated Vehicles (AVs) will be deployed in mixed traffic situations, where they will need to interact with other road users, including other vehicles, cyclists and pedestrians. Members of the Human Factors and Safety Group from ITS were one of eight partners in the EU-funded project, interACT, which aimed to address this issue.
The project ran from October 2017 to September 2020, and focused on increasing our understanding of what AV-other road user interactions might look like; providing solutions to improve these interactions; in order to enhance road safety, improve traffic flow; and increase user acceptance and trust in AVs. Our multidisciplinary team conducted a series of field and simulator studies to address key research questions, leading to the publication of 9 journal articles, 19 conference papers, and 7 deliverables (see Reference List below). In addition, data from the project contributed to 1 PhD thesis, and 5 Masters’ theses at ITS, also promoting international collaboration through 9 visiting positions from students and staff at TUDelft, Aalborg University, University of Granada, North Eastern University of China, and TUChemnitz.
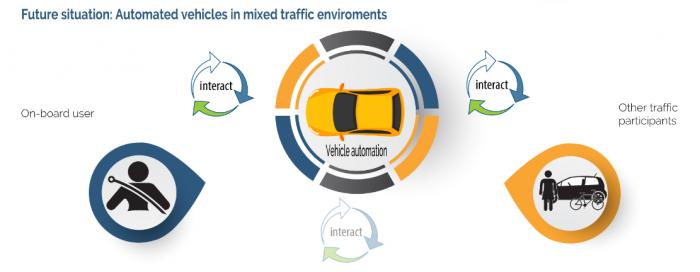 Artwork from: https://www.interact-roadautomation.eu/about-interact/
Artwork from: https://www.interact-roadautomation.eu/about-interact/
Our work on the project began with an expert workshop to identify the interACT use cases, where road user interactions are likely to happen in our current traffic environments, with an emphasis on unsignalised scenarios, where the road traffic rules were unclear. Two overarching scenarios were selected, focusing on the interactions between road users at unmarked intersections, and in parking lots (see D1.1). Together with our interACT partners at TU Munich and ICCS in Athens, we started by evaluating current road user interactions in these scenarios, conducting on-site observations and questionnaires to understand how road users interact and communicate with each other in the UK, Germany, and Greece (D2.1). As part of this collaboration, we developed a new html-based app to categorise road user interactions. Our study concluded that road users rarely used explicit communication in our chosen sites, which was mostly consistent across the different locations (Lee et al., 2020). Using the same approach in a train station car park, our study demonstrated that marginally more explicit interactions are observed at lower speeds, and that pedestrians and drivers use body-based gestures to communicate intent (Uttley et al., 2020). The knowledge from these observation studies led to the development of a conceptual framework for understanding interactive behaviour between humans and automated road traffic (Markkula et al., 2020), also progressing our understanding of the computational aspects of movement required by AVs, to handle road user interactions (Camara et al., see reference list).
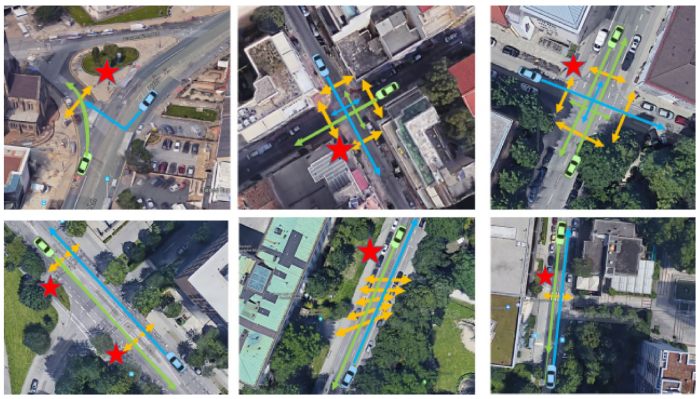
Artwork from: Lee, Y.M., Madigan, R., Giles, O., Garach-Morcillo, L., Markkula, G., Fox, C., Camara, F., Rothmueller, M., Vendelbo-Larsen, S.A., Rasmussen, P.H., Dietrich, A., Nathanael, D., Portouli, V., Schieben, A., & Merat, N. (2020) Road users rarely use explicit communication techniques when interacting in today’s traffic: Implication for Automated Vehicles. Cognition, Technology and Work, 1-14. DOI: 10.1007/s10111-020-00635-y
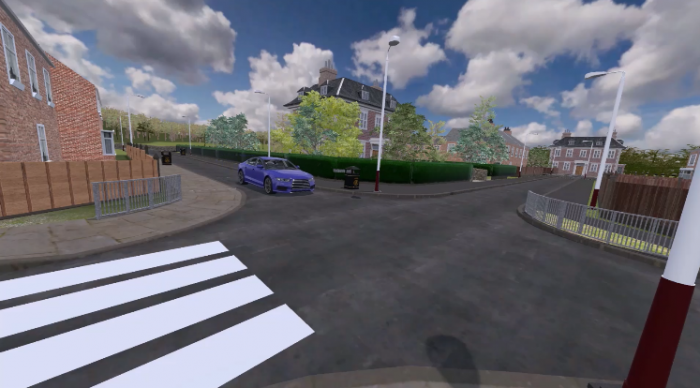
To further investigate how vehicle kinematics (e.g. deceleration onset and rate, speed, time gap, stopping distance etc.) and the presence or absence of a driver might affect pedestrians’ crossing behaviour, four different experimental studies were conducted using a Head-Mounted Display (D2.2 and D2.3). We observed a bimodal crossing pattern, whereby pedestrians either crossed when the vehicle was located far away (~over 40m), or waited until the vehicle came to a near or full stop (e.g. Lee et al., 2020b; Giles et al., 2019; Markkula et al., 2018). We also found that pedestrians reported to feel less safe when interacting with a vehicle which had no driver, or when the driver was inattentive (looking away), compared to when they interacted with a vehicle with an attentive driver (Velasco et al., under revision). Based on this work, we have been able to use quantitative models to predict pedestrians’ crossing behaviour and have created a simulation tool, which is publicly available at https://osf.io/49awh/.

Artwork from: Lee, Y.M., Uttley, J., Solernou, A., Giles, O., Markkula, G., Romano, R., & Merat, N. (2019) Investigating pedestrians’ crossing behaviour during car deceleration using wireless head mounted display: an application towards the evaluation of eHMI of automated vehicles, New Mexico, Driving Assessment, 2019.
To understand if external forms of communication by an AV is useful to pedestrians, two external Human Machine Interfaces (eHMIs) were designed as part of the interACT communication solution. At ITS, we conducted five studies to investigate the comprehension of novel eHMIs, as well as how eHMIs affect crossing experiences in different scenarios. We found that the same eHMI can be interpreted differently, highlighting the importance of correct eHMI comprehension, to avoid miscommunication (Lee et al., 2020c). Our studies also found that presence of eHMI induced early crossings and time savings for both pedestrians and AVs (e.g. D6.2, D6.3, Pekkanen et al., in prep, Lee et al., in prep), but that there is an increased risk of collision if an eHMI provides misleading information (Kaleefathullah et al., 2020).
Data analysis for our final experimental studies is still underway. These include results from a test-track study, conducted in collaboration with Centro Riecerche Fiat, to investigate pedestrians’ perception of eHMI and AV behaviour, in daylight settings; and two pedestrian simulator studies conducted in our state-of-the-art HIKER lab, where we are investigating the impact of road infrastructure on pedestrians’ interpretations of eHMI (D6.2).
For further information and regular updates on our work, please follow us on ResearchGate and Twitter (@HFS_ITSLeeds, @interACT_EU, @DrYeeMunLee, @RuthMadigan1, @markkula, @NatashaMerat). There is also a recording of our presentation for the interACT Virtual Final Event here, starting at 1:37:30. Please contact n.merat@its.leeds.ac.uk or y.m.lee@leeds.ac.uk for any information about our work in the project.

Artwork from: Lee, Y.M., Madigan, R., Uzondu, C., Garcia, J., Romano, R., Markkula, G., & Merat, N. (in prep). Learning to interpret novel eHMI: The effect of communicative indications and vehicle kinematics on pedestrians’ crossing behaviour.
 Artwork from: Lee, Y.M., Madigan, R., Uzondu, C., Garcia, J., Romano, R., Markkula, G., & Merat, N. (in prep). Learning to interpret novel eHMI: The effect of communicative indications and vehicle kinematics on pedestrians’ crossing behaviour.
Artwork from: Lee, Y.M., Madigan, R., Uzondu, C., Garcia, J., Romano, R., Markkula, G., & Merat, N. (in prep). Learning to interpret novel eHMI: The effect of communicative indications and vehicle kinematics on pedestrians’ crossing behaviour.
Artwork from our latest HIKER study: authors include Lee, Y.M., Madigan, R., Garcia, J., Merat, N. et al. (in prep)
interACT publication list (updated Nov 2020):
Deliverables:
- Dietrich, A., Bengler, K., Portouli, E., Dimitris, N., Ruenz, J., Wu, J., Merat, N., Madigan, R., Lee, Y.M., Markkula, G., Giles, O., Fox, C., Camara, F. (2018). interACT D.2.1 Preliminary description of psychological models on human-human interaction in traffic.
- Kaup, M., Wilbrink, M., Schieben, A., Willrodt, J., Weber, F., Lee, Y.M., Markkula, G., Romano, R., and Merat, N. (2018) interACT D.4.1. Preliminary interaction strategies for the interACT Automated Vehicles.
- Dietrich, A., Bengler, K., Markkula, G., Giles, O., Lee, Y.M., Pekkanen, J., Madigan, R., & Merat, N. (2019) interACT D2.2 Preliminary description of psychological models on human-human interaction in traffic.
- Lee, Y.M., Madigan, R., Markkula, G., Pekkanen, J., Merat, N., Avsar, H., Utesch, F., Schieben, A., Schießl, C., Dietrich, A., Boos, A., Boehm, M., Weber, F., Tango, F., & Portouli, E. (2019) interACT D6.1 Methodologies for the evaluation and impact assessment of the interACT solutions.
- Weber, F., Sorokin, L., Schmidt, E., Schieben, A., Wilbrink, M., Kettwich, C., Dodiya, J., Oehl, M., Kaup, M., Willrodt, J., Lee, Y.M., Madigan, R., Markkula, G., Romano, R., & Merat, N. (2019) interACT D4.2 Final human-vehicle interaction strategies for the interACT Avs.
- Dietrich, A., Lee, Y.M., Madigan, R., Merat, N. et al. (2020) interACT D6.2 Evaluation report on on-board user and road users interaction with AVs equipped with the interACT technologies.
- Madigan, R., Lee, Y.M., Markkula, G., Merat, N. et al. (2020) interACT D6.3 Impact assessment of the new interaction strategies on traffic cooperation, traffic flow, infrastructure design and road safety.
Conference papers and book chapters:
- Camara, F., Cosar, S.; Bellotto, N.; Merat, N. & Fox, C. W. Towards pedestrian-AV interaction: method for elucidating pedestrian preferences. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshops, 2018. (Published)
- Camara, F., Giles, O., Madigan, R., Rothmueller, M., Rasmussen, P.H., Vendel-bo-Larsen, A., Markkula, G., Lee, Y.M., Garach, L., Merat, N., & Fox, C.W. (2018) Predicting pedestrian road-crossing assertiveness for autonomous vehicle control, In Proc. 21st IEEE International Conference on Intelligent Transportation Systems, 2018.
- Camara, F., Giles, O., Madigan, R., Rothmuller, M., Rasmussen, P.H., Vendel-bo-Larsen, S.A., Markkula, G., Lee, Y.M., Garach, L., Merat, N. & Fox, C. (2018) Filtration analysis of pedestrian-vehicle interactions for autonomous vehicle control, In 15th International Conference on Intelligent Autonomous Systems Workshops, Baden-Baden, Germany, 11-15 Jun 2018
- Camara, F., Romano, R., Markkula, G., Madigan, R., Merat, N., & Fox, C., Em-pirical game theory of pedestrian interaction for autonomous vehicles, In Proc. Measuring Behaviour 2018: International Conference on Methods and Techniques in Behavioral Research, 2018.
- Fox, C., Camara, F., Markkula, G., Romano, R.A., Madigan, R., & Merat, N., When should the chicken cross the road?: Game theory for autonomous vehicle-human interactions, In Proc. 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Funchal, Madeira, 16-18 Mar 2018.
- Markus Rothmuller, Pernille Holm Rasmussen, Alexandra Vendelbo-Larsen, Natasha Merat, Anna Schieben. “Designing for interactions with automated vehicles: Navigating ethnography at the boundary of quantitative-data-driven disciplines” EPIC 2018 Hawaii.
- Camara F, Dickinson P, Merat N, Fox CW. 2019. Towards game theoretic AV controllers: measuring pedestrian behaviour in Virtual Reality. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019) Proceedings of TCV2019: Towards Cognitive Vehicles IROS, pp. 7-10.
- Camara F, Merat N, Fox CW. 2019. A heuristic model for pedestrian intention estimation. 2019 IEEE Intelligent Transportation Systems Conference (ITSC) Proceedings of 2019 IEEE Intelligent Transportation Systems Conference (ITSC) IEEE, pp. 3708-3713.
- Giles, O., Markkula, G., Pekkanen, J., Yokota, N., Matsunaga, N., Merat, N., & Daimon, T. (2019). At the Zebra Crossing: Modelling Complex Decision Processes with Variable-Drift Diffusion Models. In Goel, A., Seifert, C., Freksa, C. (Eds.), Proceedings of the 41st Annual Conference of the Cognitive Science Society (pp. 366-372).
- Lee, Y.M., Uttley, J., Solernou, A., Giles, O., Markkula, G., Romano, R., & Merat, N. (2019) Investigating pedestrians’ crossing behaviour during car deceleration using wireless head mounted display: an application towards the evaluation of eHMI of automated vehicles, New Mexico, Driving Assessment, 2019.
- Lee, Y.M., Uttley, J., Madigan, R., Garcia, J., Tomlinson, A., Solernou, A., Romano, R., Markkula, G., & Merat, N. (2019). Understanding the messages conveyed by automated vehicles. 2019 the 11th International Conference Automotive User Interfaces, Utrecht, Netherlands. DOI: 10.1145/3342197.3344546
- Merat, N., Lee, Y. M., Markkula, G., Uttley, J., Camara, F., Fox, C., … & Schieben, A. (2019, July). How Do We Study Pedestrian Interaction with Automated Vehicles? Preliminary Findings from the European interACT Project. In Automated Vehicles Symposium (pp. 21-33). Springer, Cham. DOI: 10.1007/987-3-030-22933-7_3
- Portouli, E., Nathanael, D., Amditis, A., Lee, Y.M., Merat, N., Uttley, J., Giles, O., Markkula, G., Dietrich, A., Schieben, A., and Jenness, J. (2019). Methodologies to Understand the Road User Needs when Interacting with Automated Vehicles. Human-Computer Interaction International (HCII) 2019, Orlando, Florida, USA.
- Schieben, A., Wilbrink, M., Kettwich, C., Dodiya, J., Oehl, M., Weber, F., Sorokin, L., Lee, Y.M., Madigan, R., Markulla, G., Merat, N. (2019). Testing external HMI designs for automated vehicles – An overview on user study results from the EU project interACT. Conference ‘Automatisiertes Fahren’. http://www.tuev-sued.de/akademiede/congress/automobil-bahn/automatisiertes-fahren
- Velasco, J.P.N, Lee, Y.M., Uttley, J, Solernou, A., Farah, H., van Arem, B., Hagenzieker, M., and Merat, N. (2019). Interactions with automated vehicles: The effect of drivers’ attentiveness and presence on pedestrians’ road crossing behaviour. Road Safety and Simulation 2019, Iowa, USA.
- Camara F, Cosar S, Bellotto N, Merat N, Fox C. 2020. Continuous Game Theory Pedestrian Modelling Method for Autonomous Vehicles. In: Olaverri-Monreal C; García-Fernández F; Rossetti RJF (eds.) Human Factors in Intelligent Vehicles. 1. River Publishers.
- Camara, F., Dickinson, P., Merat, N., & Fox, C (2020) Examining Pedestrian-Autonomous Vehicle Interactions. Proceedings of 8th Transport Research Arena TRA 2020, April 27-30, 2020, Helsinki, Finland.
- Camara F, Fox C. 2020. Game Theory For Self-Driving Cars. 3rd UK-RAS Conference.
- Schieben, A., Wilbrink, M., Dietrich, A., Portouli, E., Kaup, M., Tango, F., Lee, Y.M., Weber, F., Ruenz, J., Althoff, M., Amditis, A., & Merat, N. (2020) Designing cooperative interaction of automated vehicles in mixed traffic environments: Results from the interACT project. Proceedings of 8th Transport Research Arena TRA 2020, April 27-30, 2020, Helsinki, Finland.
Journal articles:
- Markkula, G., Romano, R., Madigan, R., Fox, C. W., Giles, O. T., & Merat, N. (2018). Models of human decision-making as tools for estimating and optimizing impacts of vehicle automation. Transportation research record, 2672(37), 153-163. https://doi.org/10.1177/0361198118792131
- Camara F, Bellotto N, Cosar S, Nathanael D, Althoff M, Wu J, Ruenz J, Dietrich A, Fox C. (2020). Pedestrian Models for Autonomous Driving Part I: Low-Level Models, from Sensing to Tracking. IEEE Transactions on Intelligent Transportation Systems. DOI:10.1016/j.trf.2020.05.004
- Camara F, Bellotto N, Cosar S, Weber F, Nathanael D, Althoff M, Wu J, Ruenz J, Dietrich A, Markkula G, Schieben A, Tango F, Merat N, Fox C. (2020). Pedestrian Models for Autonomous Driving Part II: High-Level Models of Human Behavior. IEEE Transactions on Intelligent Transportation Systems. DOI: 10.1016/j.trf.2020.05.004
- Kaleefathullah, A., Merat, N., Lee, Y.M., Eisma, Y.B., Madigan, R., Garcia, J., & Winter, J. (2020) External Human-Machine Interfaces can be Misleading: An examination of trust development and misuse in a CAVE-based pedestrian simulation environment. Human Factors: The Journal of the Human Factors and Ergonomics Society. DOI: 10.1177/0018720820970751
- Lee, Y.M., Madigan, R., Giles, O., Garach-Morcillo, L., Markkula, G., Fox, C., Camara, F., Rothmueller, M., Vendelbo-Larsen, S.A., Rasmussen, P.H., Dietrich, A., Nathanael, D., Portouli, V., Schieben, A., & Merat, N. (2020) Road users rarely use explicit communication techniques when interacting in today’s traffic: Implication for Automated Vehicles. Cognition, Technology and Work, 1-14. DOI: 10.1007/s10111-020-00635-y
- Markkula, G., Madigan, R., Nathanael, D., Portouli, E., Lee, Y.M., Dietrich, A., Billington, J., Schieben, A., and Merat, N. (2020) Defining interactions: A conceptual framework for understanding interactive behaviour in human and automated road traffic. Theoretical Issues in Ergonomics Science (TTIE). DOI: 10.1016/j.trf.2020.05.004
- Uttley, J., Lee, Y.M., Madigan, R., & Merat, N. (2020) Investigating Road user interactions in a shared space setting: understanding what means of communication are needed for future automated vehicles. Transportation Research Part F, 72, 32-46. DOI:10.1016/j.trf.2020.05.004
- Madigan, R., Lee, Y.M., & Merat, N. (under review). Validating a Methodology for Understanding Pedestrian – Vehicle Interactions: A Comparison of Video and Field Observations.
- Velasco, J.P.N., Lee, Y.M., Uttley, J., Solernou, A., Farah., van Arem, B., Hagenzieker, M., Merat, N. (under review) Will pedestrians cross the road before an Automated Vehicle? The Effect of Drivers’ Attentiveness and Presence on Pedestrians’ Road Crossing Behavior.
- Lee, Y.M., Madigan, R., Uzondu, C., Garcia, J., Romano, R., Markkula, G., & Merat, N. (2020). Learning to interpret novel eHMI: The effect of communicative indications and vehicle kinematics on pedestrians’ crossing behaviour. Manuscript in preparation.
- Pekkanen, J. et al. (2020). Variable-drift diffusion models of pedestrian road-crossing decisions. Manuscript in preparation.